

UAV飛行計画コース設計
国土地理院より「UAVを用いた公共測量マニュアル(案)」(平成29年3月改正)が公開され、測量・設計分野においてドローンが実務の中に浸透しつつあります。
また、建設分野ではi-Constructionの中でもドローン(UAV)は注目される技術の1つとなっています。
実務の中でUAVを活用するにあたり、精度の高い運用が求められるフェーズへ移行しています。
PC-MAPPINGでは、撮影諸条件を設定することで、撮影対象エリアの標高から撮影される範囲を計算し、最適なルート設計を行う機能を提供します。
また、建設分野ではi-Constructionの中でもドローン(UAV)は注目される技術の1つとなっています。
実務の中でUAVを活用するにあたり、精度の高い運用が求められるフェーズへ移行しています。
PC-MAPPINGでは、撮影諸条件を設定することで、撮影対象エリアの標高から撮影される範囲を計算し、最適なルート設計を行う機能を提供します。
精度の高い運用が求められる背景
ドローン(UAV)の普及に伴い、事故が増加しています。また、測量、建設等の”仕事”として飛行する場合には、やみくもに飛行するのではなく、根拠ある飛行計画が求められます。
根拠とは、例えば、撮影結果に基準に従ったオーバーラップ率を保持したり、隙間や撮影漏れがないこと等が挙げられます。
せっかく撮影しても、基準に満たないオーバーラップ率であったり、隙間や撮影漏れがあると、再度基準を満たすように撮影をし直さなければいけません。
つまり、作業費用(機材や人件費も)かさんでしまいます。
しかし、マニュアル制御(手動操作)での飛行には熟練の技術が必要ですし、精度の限界が存在します。
それはなぜでしょうか?
撮影対象となる地面等は、その場所により高低差や斜面があります。
飛行高度が低いドローンは高低差や斜面等の地形の影響を大きく受けてしまうからです。
根拠とは、例えば、撮影結果に基準に従ったオーバーラップ率を保持したり、隙間や撮影漏れがないこと等が挙げられます。
せっかく撮影しても、基準に満たないオーバーラップ率であったり、隙間や撮影漏れがあると、再度基準を満たすように撮影をし直さなければいけません。
つまり、作業費用(機材や人件費も)かさんでしまいます。
しかし、マニュアル制御(手動操作)での飛行には熟練の技術が必要ですし、精度の限界が存在します。
それはなぜでしょうか?
撮影対象となる地面等は、その場所により高低差や斜面があります。
飛行高度が低いドローンは高低差や斜面等の地形の影響を大きく受けてしまうからです。
標高を加味したコース設計の重要性
飛行機やヘリコプターによる高高度からの撮影では、地表面の高低差(標高)は、撮影結果に大きな影響を及ぼすことは多くはありませんでした。
しかし、ドローン(UAV)は低高度で飛行するため、地表面の高低差(標高)の影響を大きく受けることになります。
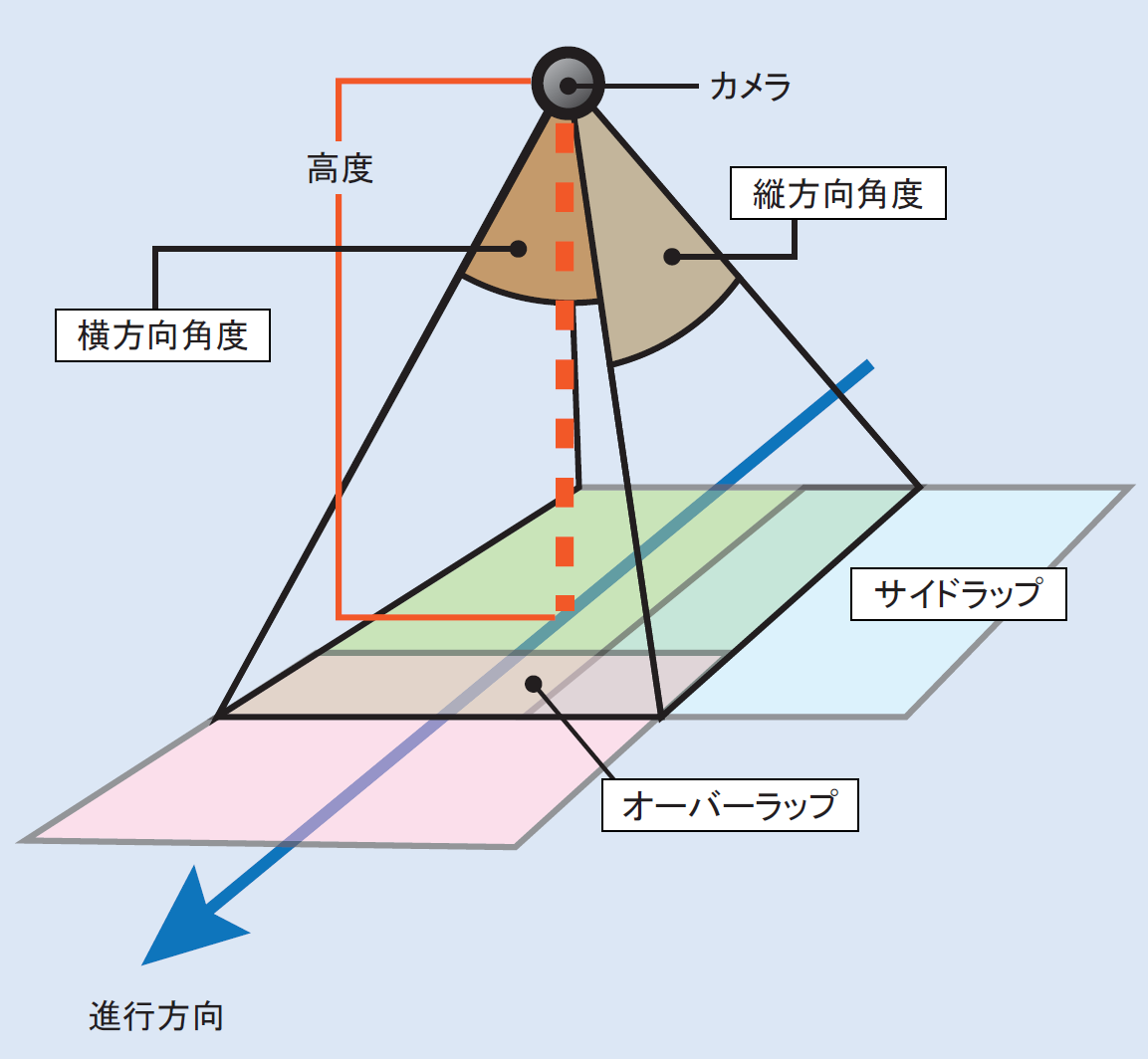
なぜなら、ドローンで撮影した1枚の写真の撮影範囲は、カメラから地表面までの距離(飛行高度)とカメラ緒元(焦点距離やピクセルサイズ)で決定するからです。
地表面が水平と仮定して飛行してしまうと、現実では地表面の高さ(標高)が変化するので、カメラから地表面までの距離(飛行高度)が変わり、1枚の写真の撮影範囲が論理値と異なってしまいます。
地表面の高低差(標高)が大きい、ドローン(UAV)の飛行高度が低いほど、理論値との相違は大きくなります。
しかし、ドローン(UAV)は低高度で飛行するため、地表面の高低差(標高)の影響を大きく受けることになります。
なぜなら、ドローンで撮影した1枚の写真の撮影範囲は、カメラから地表面までの距離(飛行高度)とカメラ緒元(焦点距離やピクセルサイズ)で決定するからです。
地表面が水平と仮定して飛行してしまうと、現実では地表面の高さ(標高)が変化するので、カメラから地表面までの距離(飛行高度)が変わり、1枚の写真の撮影範囲が論理値と異なってしまいます。
地表面の高低差(標高)が大きい、ドローン(UAV)の飛行高度が低いほど、理論値との相違は大きくなります。
具体例を下図に表しました。
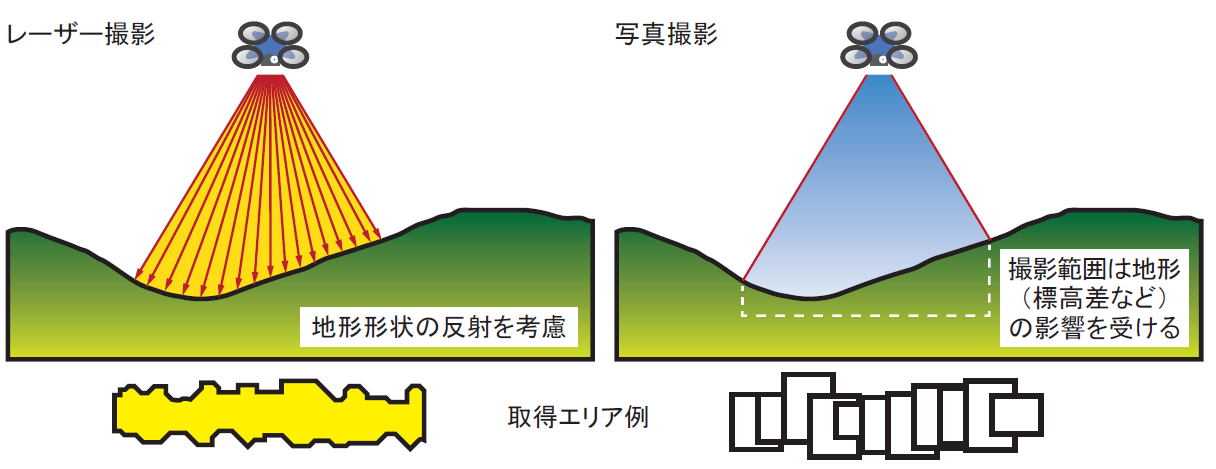
現実世界で考える撮影範囲
凹地形の場合、撮影範囲は地表面が水平な場合よりも狭くなることがわかります。
撮影範囲が狭くなると、
・予定していたオーバーラップ率、サイドラップ率を確保できない
・撮影結果に隙間ができる
・撮影されない範囲が発生する
等の問題が発生する可能性があります。
すなわち、標高を加味して写真1枚ごとの撮影範囲を計算、撮影コース(飛行計画)を設計することができます。
上述の問題はクリアされより精度の高い飛行計画となります。
撮影範囲が狭くなると、
・予定していたオーバーラップ率、サイドラップ率を確保できない
・撮影結果に隙間ができる
・撮影されない範囲が発生する
等の問題が発生する可能性があります。
すなわち、標高を加味して写真1枚ごとの撮影範囲を計算、撮影コース(飛行計画)を設計することができます。
上述の問題はクリアされより精度の高い飛行計画となります。
手持ちの地図をベースに撮影範囲を決定
いくら精度の高い飛行計画を作成できたとしても、膨大な労力がかかってしまうことは避けたいのが”仕事”です。
「PC-MAPPING」では、GISエンジンとしての機能を活用し撮影コースの設計を行います。
「PC-MAPPING」では、GISエンジンとしての機能を活用し撮影コースの設計を行います。
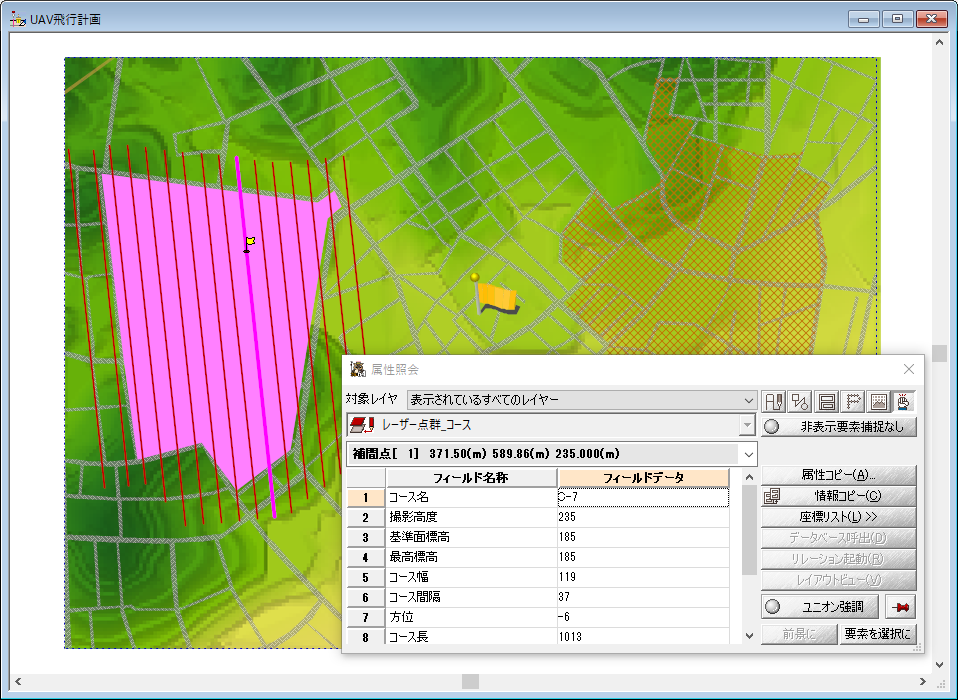
撮影コースの設計に必要な材料は
その他にも、例えば地番図や道路網図、現場図面等お手持ちの地図・図面データを背景におくことができます。
業務の撮影範囲を決定するにあたり必要な情報を重ねて表示できるので、視覚的に撮影位置を把握し撮影範囲の検討材料とすることができます。
- 標高メッシュデータ
- 撮影範囲とする面データ(ポリゴン)
その他にも、例えば地番図や道路網図、現場図面等お手持ちの地図・図面データを背景におくことができます。
業務の撮影範囲を決定するにあたり必要な情報を重ねて表示できるので、視覚的に撮影位置を把握し撮影範囲の検討材料とすることができます。
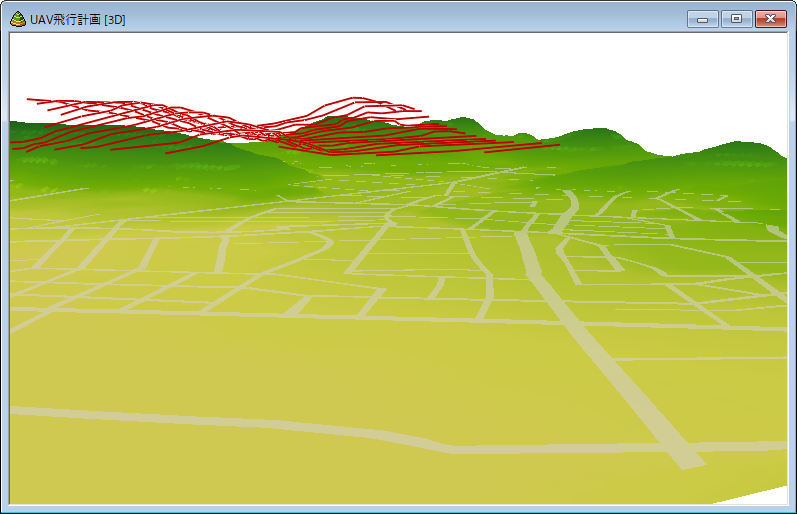
撮影コースの設計では、
設計したコースで飛行するとどうなるのか?といった確認も「PC-MAPING」の[3D表示]機能で視覚的にとらえることができます。
- 出発地点
- カメラ緒元(焦点距離やピクセルサイズ)、レーザーの場合は視野角
- 撮影条件(撮影高度、サイドラップ率、オーバーラップ率)
- 撮影コースのエクスポート形式
設計したコースで飛行するとどうなるのか?といった確認も「PC-MAPING」の[3D表示]機能で視覚的にとらえることができます。