PC-MAPPINGでのLASファイルの取り扱いについて
PC-MAPPINGでは点群データの標準フォーマットであるLASのインポートが可能です。
この機能は、基本的に座標データが入った点群データを取り込んでGISデータとすることが主眼となります。そのため、点群データそのものへの編集機能は設けていませんが、三次元モデルや点群データに関する機能はどんどん追加されています。
今回はLASのフォーマットについて簡単におさらいしながら、PC-MAPPINGでのLASファイルの取り扱いに関してご紹介します。
この機能は、基本的に座標データが入った点群データを取り込んでGISデータとすることが主眼となります。そのため、点群データそのものへの編集機能は設けていませんが、三次元モデルや点群データに関する機能はどんどん追加されています。
今回はLASのフォーマットについて簡単におさらいしながら、PC-MAPPINGでのLASファイルの取り扱いに関してご紹介します。
LAS(LIDAR Data Exchange Format)とは
LASとは、ASPRS(The American society for Photogrammetry and Remote Sensing:アメリカ写真測量・リモートセンシング協議会)が定義する、LIDAR(Light Detection and Ranging:レーザー検出および測距)により計測された点群データの標準フォーマットです。
LASは点群データの相互交換に適したバイナリ形式のオープンフォーマットで、点群データの業界標準としてPC-MAPPINGをはじめとする様々なGISソフトの間で広く利用されています。
LASは点群データの相互交換に適したバイナリ形式のオープンフォーマットで、点群データの業界標準としてPC-MAPPINGをはじめとする様々なGISソフトの間で広く利用されています。
LASファイルの定義について
現在公開されている最新フォーマットは、2019年7月に改訂されたLAS 1.4です。
LAS1.4には、後方互換性があるためLAS1.1からLAS1.3のペイロードをLAS1.4のファイル構造に配置することができます。
LAS1.4の定義書は、こちらから取得できます(PDFが開きます)。
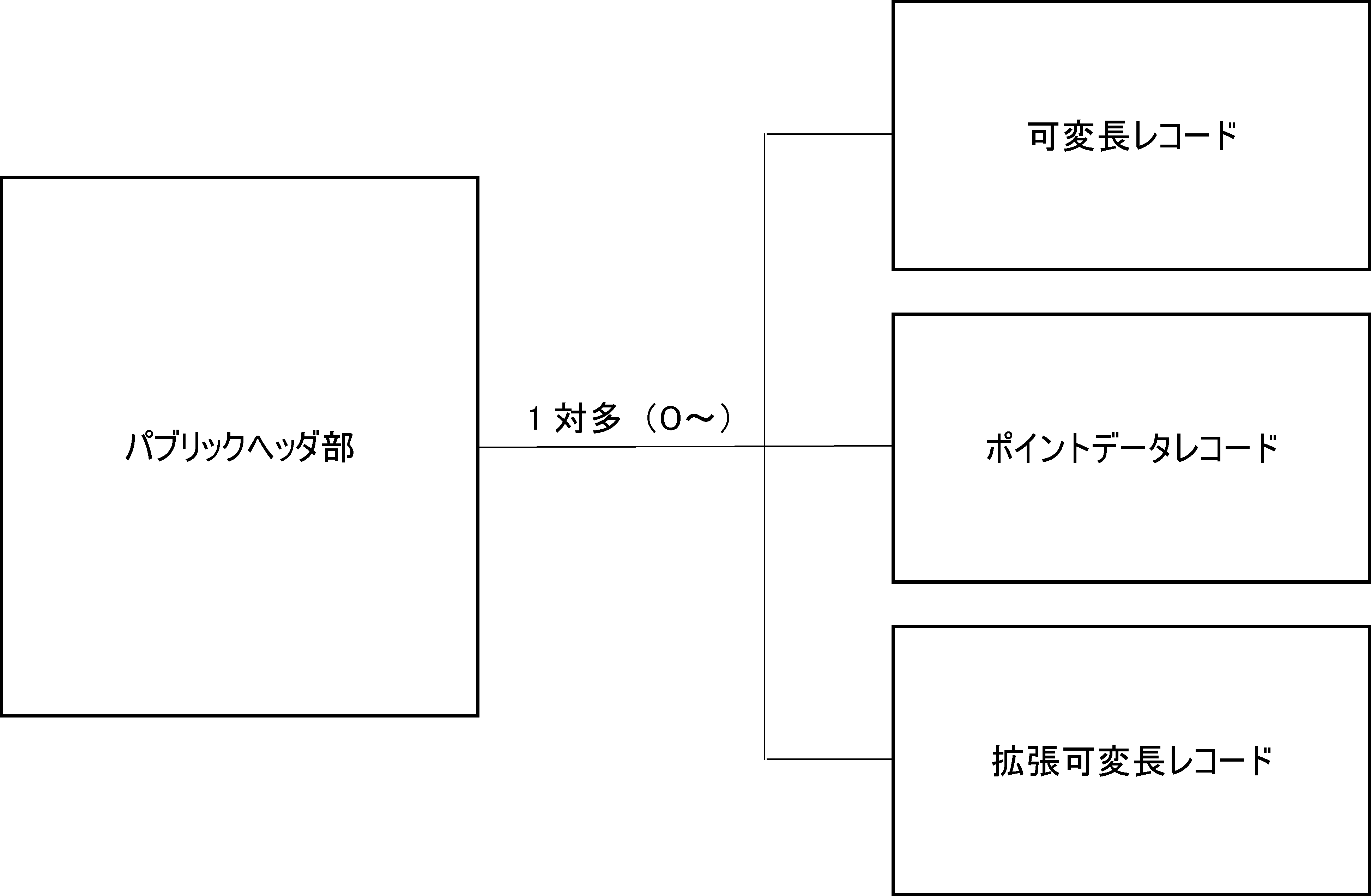
LASファイルは、1つのパブリックヘッダ部、任意の数の可変長レコード、計測したポイント分のポイントデータレコード、任意の数の拡張可変長レコードで構成されます。
LAS1.4には、後方互換性があるためLAS1.1からLAS1.3のペイロードをLAS1.4のファイル構造に配置することができます。
LAS1.4の定義書は、こちらから取得できます(PDFが開きます)。
LASファイルは、1つのパブリックヘッダ部、任意の数の可変長レコード、計測したポイント分のポイントデータレコード、任意の数の拡張可変長レコードで構成されます。
1.パブリックヘッダ部(Public Header Block)
ポイント数やポイントの範囲などを定義するデータで、LASファイル全体についての属性情報を設定する部分です。
ポイント数やポイントの範囲などを定義するデータで、LASファイル全体についての属性情報を設定する部分です。
2.可変長レコード(Variable Length Records:VLRs)
可変長レコードは、パブリックヘッダ部の後に続くレコードです。可変長レコードの長さは、パブリックヘッダ部の「Offset to Point Data(ポイントデータへのオフセット)」フィールドで定義されます。
LASにおけるCRS(Coordinate Reference System:座標参照系)情報は、可変長レコードに記載されます。LAS1.3まではGeoTIFFのみサポートされていましたが、LAS1.4ではWKT(Well Known Text)がサポートされるようになりました。
LAS1.3以前との後方互換性を持つポイントデータレコードのフォーマット0~5については、パブリックヘッダ部の「GlobalEncoding」内の「WKT」をセットしない(=false)場合はGeoTIFF形式、セットする(=true)場合はWKT形式で記述されたものが参照されます。LAS1.4で登場したフォーマット6~10についてはGeoTIFFはサポートされず、WKTのみが利用可能です。
可変長レコードは、パブリックヘッダ部の後に続くレコードです。可変長レコードの長さは、パブリックヘッダ部の「Offset to Point Data(ポイントデータへのオフセット)」フィールドで定義されます。
LASにおけるCRS(Coordinate Reference System:座標参照系)情報は、可変長レコードに記載されます。LAS1.3まではGeoTIFFのみサポートされていましたが、LAS1.4ではWKT(Well Known Text)がサポートされるようになりました。
LAS1.3以前との後方互換性を持つポイントデータレコードのフォーマット0~5については、パブリックヘッダ部の「GlobalEncoding」内の「WKT」をセットしない(=false)場合はGeoTIFF形式、セットする(=true)場合はWKT形式で記述されたものが参照されます。LAS1.4で登場したフォーマット6~10についてはGeoTIFFはサポートされず、WKTのみが利用可能です。
3.ポイントデータレコード(Point Data Records)
ポイントデータレコードでは、三次元座標や色情報などの属性情報を含むポイントクラウド内の個々のポイントのデータを示します。
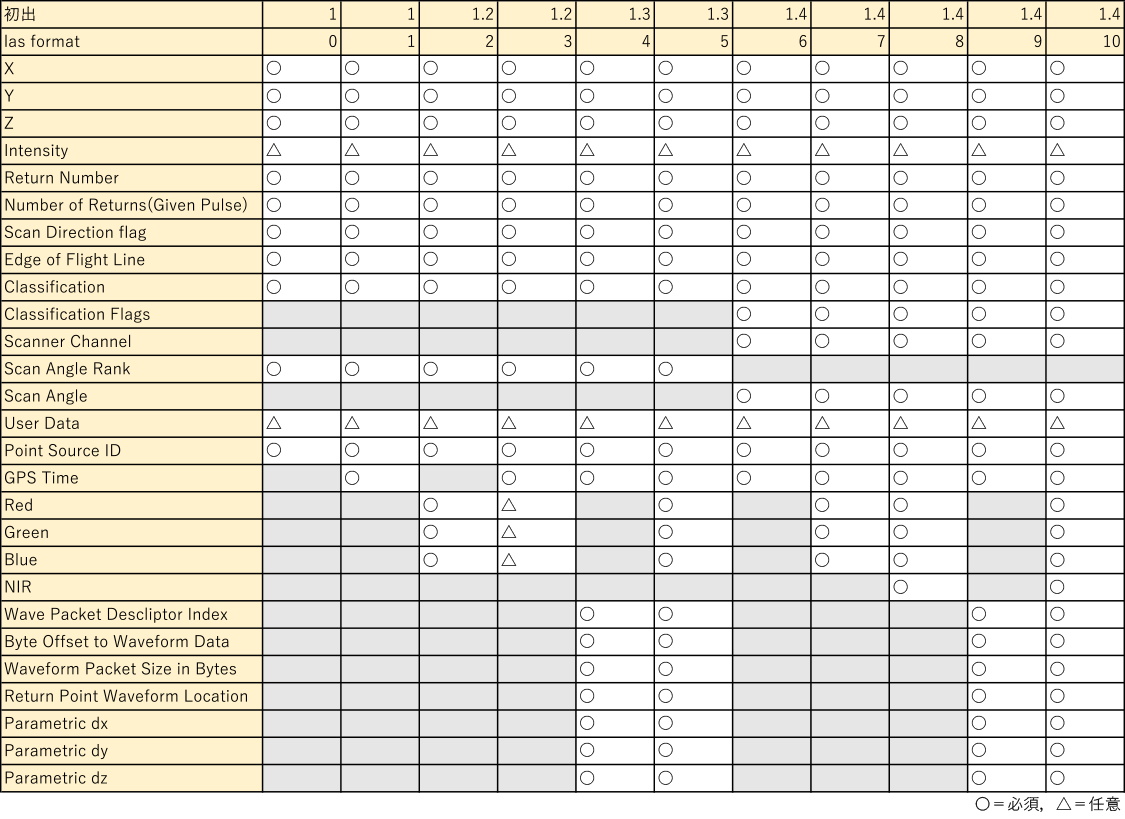
ポイントデータレコードは、バージョンを経るごとにフォーマットが追加されており、LAS1.4の時点では0~10までの計11個のフォーマットが存在します。フォーマット0が最も基本的な構成となっており、フォーマット1以降は拡張的な構成となっています。
LAS1.4では、全てのフォーマットが利用可能ですが、推奨される形式は6~10となっています。
フォーマットによってGPS時間やRGBなどのデータフィールドが異なるため、ファイル内ではポイントデータレコードの形式が同一である必要があります。
以下、ポイントデータレコードフォーマットの項目一覧表です。
ポイントデータレコードでは、三次元座標や色情報などの属性情報を含むポイントクラウド内の個々のポイントのデータを示します。
ポイントデータレコードは、バージョンを経るごとにフォーマットが追加されており、LAS1.4の時点では0~10までの計11個のフォーマットが存在します。フォーマット0が最も基本的な構成となっており、フォーマット1以降は拡張的な構成となっています。
LAS1.4では、全てのフォーマットが利用可能ですが、推奨される形式は6~10となっています。
フォーマットによってGPS時間やRGBなどのデータフィールドが異なるため、ファイル内ではポイントデータレコードの形式が同一である必要があります。
以下、ポイントデータレコードフォーマットの項目一覧表です。
4.拡張可変長レコード(Extended Variable Length Records:EVLRs)
ポイントレコードデータの後には任意の数の拡張可変長レコードを続けることができます。
拡張可変長レコードのヘッダ項目は、可変長レコードと同じです。
ポイントレコードデータの後には任意の数の拡張可変長レコードを続けることができます。
拡張可変長レコードのヘッダ項目は、可変長レコードと同じです。
このようなLASの構成を踏まえて、PC-MAPPINGにおけるLASファイルの取り扱いについて見ていきましょう。
LASファイルのインポート方法
PC-MAPPINGではLAS形式の点群データをインポートする際、
[インポート] - [点群・TINデータ]内の
① 航空レーザープロファイラー等インポート
② ポイントクラウド
③ LASデータサンプリング
の3つの中から適宜選択して、インポートを実行します。
それぞれ使用用途が異なるため、各機能の特徴を見てみましょう。
[インポート] - [点群・TINデータ]内の
① 航空レーザープロファイラー等インポート
② ポイントクラウド
③ LASデータサンプリング
の3つの中から適宜選択して、インポートを実行します。
それぞれ使用用途が異なるため、各機能の特徴を見てみましょう。
①航空レーザープロファイラー等インポート
[インポート] - [点群・TINデータ] - [航空レーザープロファイラー等インポート]
この機能では、航空レーザー測量で取得したオリジナルデータや、オリジナルデータから樹木や建物などの遮蔽物を除去したグランドデータをtxt形式、csv形式、las形式のいずれかでインポートできます。
また、水部ポリゴンデータもtxt形式、shp形式にてインポートすることができます。
この機能では、航空レーザー測量で取得したオリジナルデータや、オリジナルデータから樹木や建物などの遮蔽物を除去したグランドデータをtxt形式、csv形式、las形式のいずれかでインポートできます。
また、水部ポリゴンデータもtxt形式、shp形式にてインポートすることができます。
②ポイントクラウド
[インポート] - [点群・TINデータ] - [ポイントクラウド]
この機能は、各種点群データの取り込みに対応した機能です。テキストファイル(*.csv、*.txt、*.pts)、航空機LIDARバイナリ形式(*.las)、PC-MAPPING形式(*.psl)のポイントクラウドデータをインポートし、クラウドポイントマネージャー形式(*.psc)に変換して出力します。
この機能は、各種点群データの取り込みに対応した機能です。テキストファイル(*.csv、*.txt、*.pts)、航空機LIDARバイナリ形式(*.las)、PC-MAPPING形式(*.psl)のポイントクラウドデータをインポートし、クラウドポイントマネージャー形式(*.psc)に変換して出力します。
③LASデータサンプリング
[インポート] - [点群・TINデータ] - [ LASデータサンプリング]( LASデータを部分的に抽出してポイントデータに変換)
LASファイルを指定の最大点数以下になるように間引きを入れて読み取り、ファイル単位にポイントデータとして登録したレイヤーを生成します。
膨大な量の点データを全て表示するのではなく、ある程度間引くことで、素早く処理が行えます。
そのため、大まかな見た目の確認やポイントデータレコードの情報を手早く確認する際に適した機能となります。
マシンのスペックにもよりますが、最大で3000万点くらいまで取り込み可能です。
素早く取り込むには10万点~100万点くらいに絞るのがよさそうです。
LASファイルを指定の最大点数以下になるように間引きを入れて読み取り、ファイル単位にポイントデータとして登録したレイヤーを生成します。
膨大な量の点データを全て表示するのではなく、ある程度間引くことで、素早く処理が行えます。
そのため、大まかな見た目の確認やポイントデータレコードの情報を手早く確認する際に適した機能となります。
マシンのスペックにもよりますが、最大で3000万点くらいまで取り込み可能です。
素早く取り込むには10万点~100万点くらいに絞るのがよさそうです。
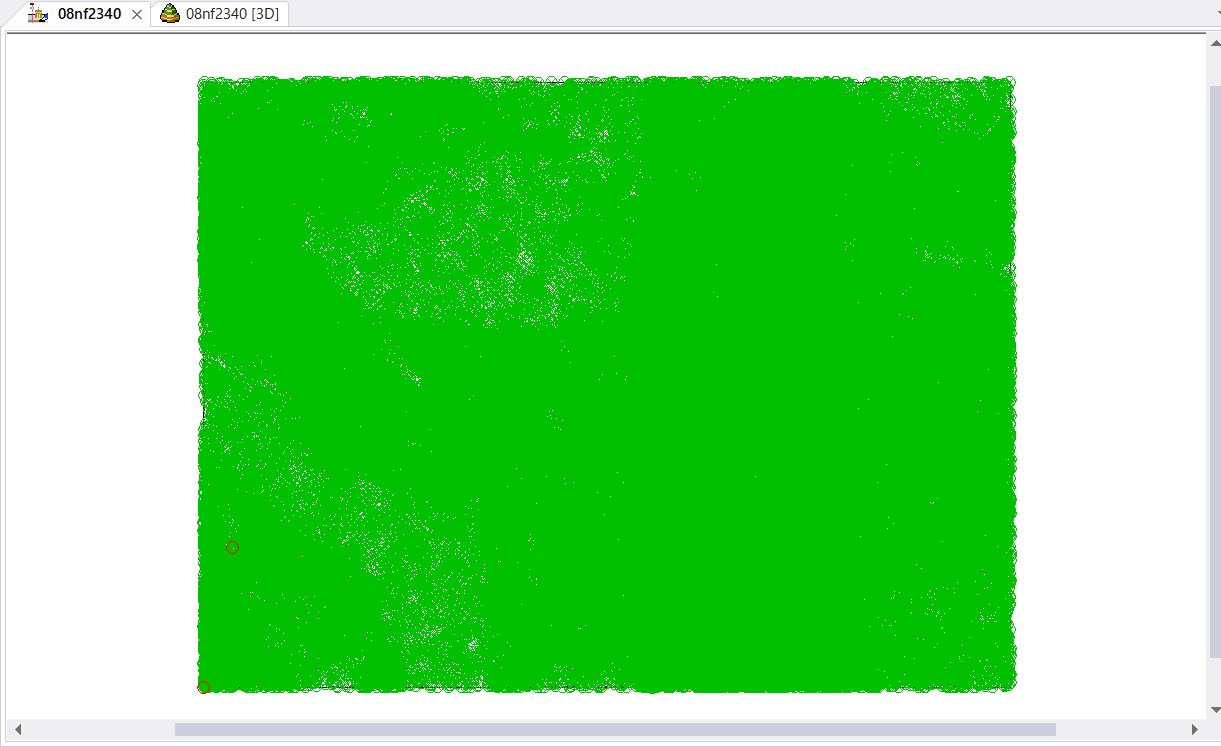
↑約1千万点の点群データを最大10万点まで間引いて取り込んだもの(G空間情報センター「静岡県熱海市3次元点群データ」より)
また、パブリックヘッダ部の属性情報を持つ図郭ポリゴンの生成や、フォーマット上のすべての属性情報を取り込むなど、オプション処理も充実している機能です。
さらに、2021/9/8に更新されたPCM8.021にて、「指定のLASファイルに集約して出力する」オプションが追加されました。間引きしたデータをレイヤーのポイントデータに変換するのではなく、LASファイル、または、"X,Y,Z,R,G,B,I,C"のCSVファイルに集約して出力されます。
PC-MAPPINGには上記に挙げた機能以外にも点群データ関連の機能が存在します。
詳しくは『PC-MAPPING 点群データ関連機能』をご覧ください。
さらに、2021/9/8に更新されたPCM8.021にて、「指定のLASファイルに集約して出力する」オプションが追加されました。間引きしたデータをレイヤーのポイントデータに変換するのではなく、LASファイル、または、"X,Y,Z,R,G,B,I,C"のCSVファイルに集約して出力されます。
PC-MAPPINGには上記に挙げた機能以外にも点群データ関連の機能が存在します。
詳しくは『PC-MAPPING 点群データ関連機能』をご覧ください。
PC-MAPPINGで点群データを利用する
ベクターデータと点群データを重ねることで、ポリゴンに含まれている点群データの数を調べることや、標高値の集計を行うことができます。
例として今回は、G空間情報センター「静岡県熱海市3次元点群データ」からダウンロードしたLASファイルを使用して、ポリゴン領域に包含されるLASポイントデータ集計を行います。
例として今回は、G空間情報センター「静岡県熱海市3次元点群データ」からダウンロードしたLASファイルを使用して、ポリゴン領域に包含されるLASポイントデータ集計を行います。
1.LASデータをインポートする
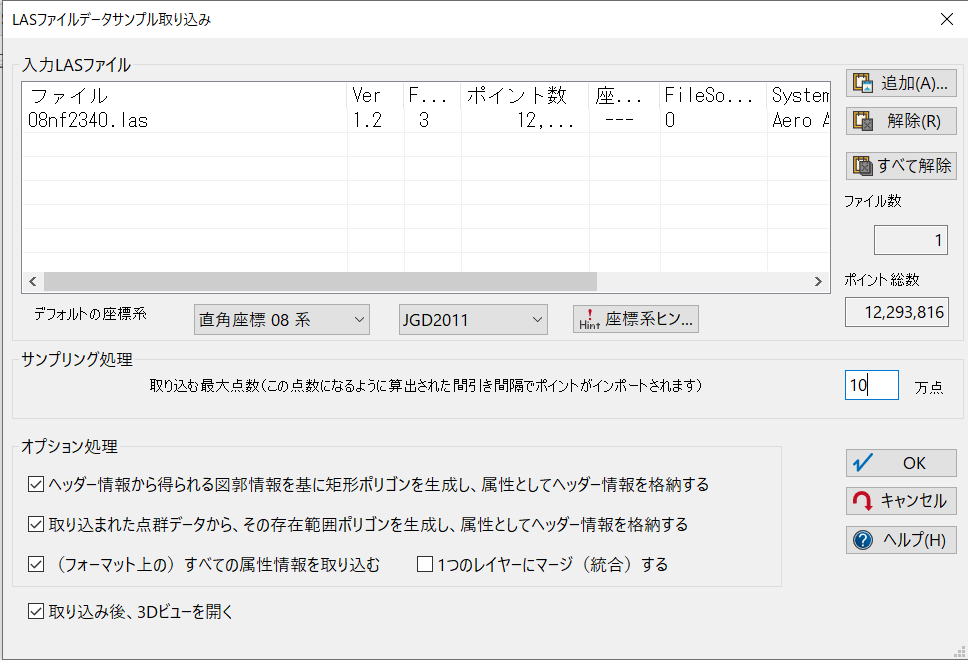
[インポート] - [点群・TINデータ] - [LASデータサンプリング ] を実行します。
【追加】ボタンをクリックして、インポートするファイルを指定します。
今回はポリゴンを使ってポイントデータの集計を行うため、「ヘッダー情報から得られる図郭情報を基に矩形ポリゴンを生成し、属性としてヘッダー情報を格納する」をONにします。その他必要に応じて適宜設定をし、【OK】をクリックします。
「取り込み後、3Dビューを開く」をONにすると、実行後すぐに3Dモデルを確認することができます。
【追加】ボタンをクリックして、インポートするファイルを指定します。
今回はポリゴンを使ってポイントデータの集計を行うため、「ヘッダー情報から得られる図郭情報を基に矩形ポリゴンを生成し、属性としてヘッダー情報を格納する」をONにします。その他必要に応じて適宜設定をし、【OK】をクリックします。
「取り込み後、3Dビューを開く」をONにすると、実行後すぐに3Dモデルを確認することができます。
↑3D表示
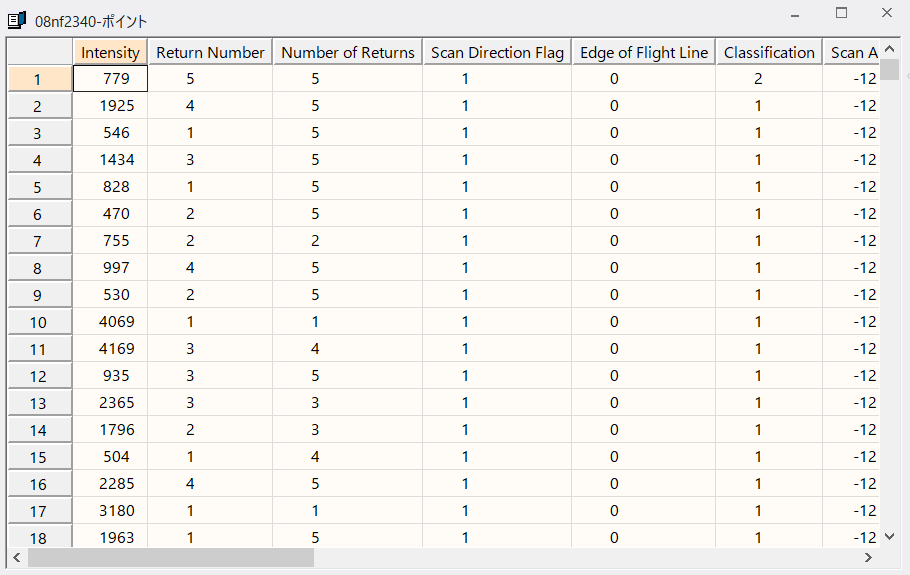
↑ポイントデータ
2.ポリゴン領域に包含されるLASポイントデータを集計する
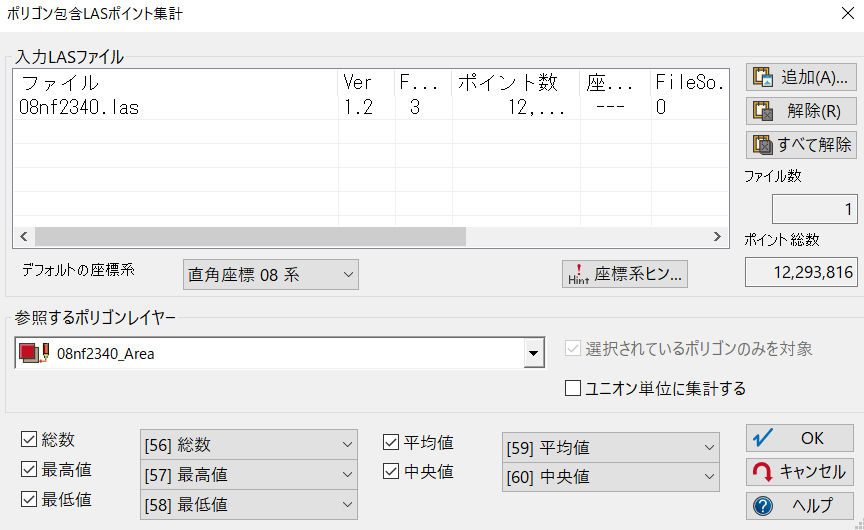
[編集] - [ポイントクラウド] - [ポリゴン領域に包含されるLASポイントデータの集計で抽出]を実行します。
【追加】をクリックし、「1.LASデータをインポートする」でインポートしたものと同じファイルを指定します。
「参照するポリゴンレイヤー」では、「1.LASデータをインポートする」で生成した矩形ポリゴンを指定します。
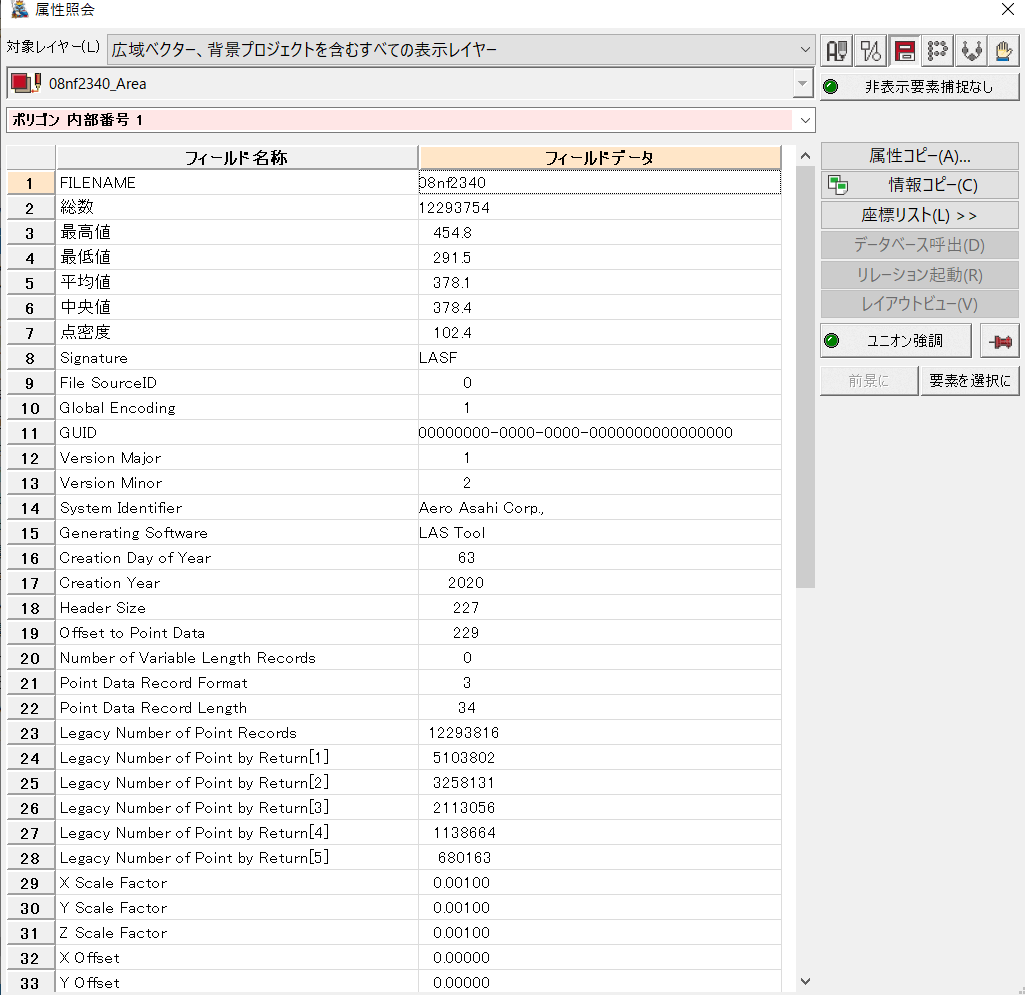
その他適宜設定し、【OK】をクリックすると、指定レイヤーのポリゴン領域内に含まれるLASファイルポイントデータの総数や高さの最大・最小・平均・中間値が求められます。
集計結果は、ポリゴンの内部属性として登録されます。
【追加】をクリックし、「1.LASデータをインポートする」でインポートしたものと同じファイルを指定します。
「参照するポリゴンレイヤー」では、「1.LASデータをインポートする」で生成した矩形ポリゴンを指定します。
その他適宜設定し、【OK】をクリックすると、指定レイヤーのポリゴン領域内に含まれるLASファイルポイントデータの総数や高さの最大・最小・平均・中間値が求められます。
集計結果は、ポリゴンの内部属性として登録されます。